06.10.2016 - 12:00
— Ми експериментуємо із тематикою статей, пробуємо різні теми, відмінні від основної, шукаємо, що сподобається читачам.
— Я в дитинстві любив конструктори. В мене було декілька різних, проте вони були простенькі. І я хотів багато-багато деталей, щоб збирати з них усе.













А чим ви любили гратися в дитинстві? А чим хотіли гратися? А може ви і зараз не проти чимось погратися? Ось я не відмовив собі в задоволенні і погрався конструктором від Makeblock. Ні, я не купував його і у нас у продажу його немає, тільки через Інтернет. Та й недешева ця забавка.
Makeblock — це конструктори для навчання дітей основам програмування — в його основі лежить плата з Arduino. На сайті виробника є різні набори — від мінімального Starter Kit до великих наборів. Деталі та складові можна докупити пізніше залежно від бажання.
Мені дали погратися початковим набором. Невелика яскрава коробка відповідає наповненню і спонукає відкрити. Насправді, мені дали піврозібраного робота, бо ним уже гралися, я поскладав деталі в коробку для зйомки і, можливо, зробив це не так, як було із заводу.
В коробці зверху красиво викладені основні деталі. Дроти, гвинтики, гусениці, шини, кабель та інше заховано нижче.
Також тут є інструкція, вся в картинках. Перекладати не треба, всім все ясно і зрозуміло. Інструкція чудова.
Основні деталі, з яких складається шасі, та електроніка. Вони металеві, сам конструктор виглядає досить міцним.
Все інше розкладено по пакетиках, зокрема гвинтики та гаєчки, які тут різних розмірів та довжини.
Є взагалі мікроскопічний гвинт для фіксації коліс.
Це наявний інструмент. Підозрюю, що викрутка не рідна. Шестигранні ключики призначені для гвинтиків.
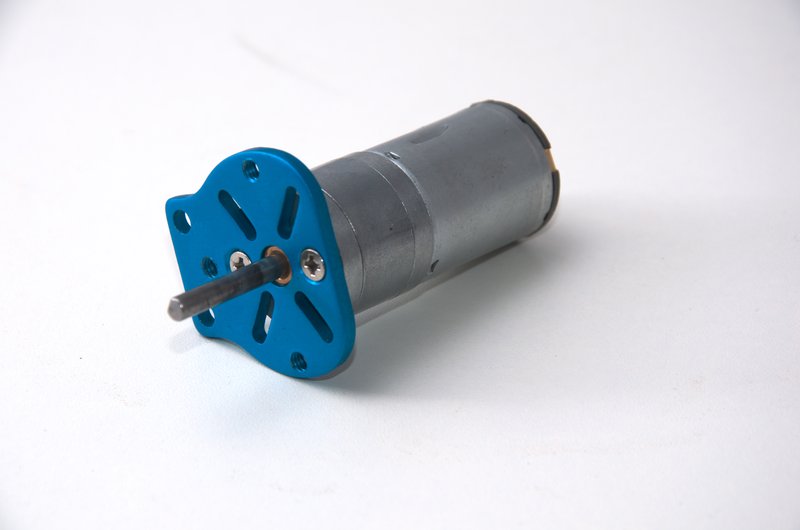
Це двигуни — у кожного свій редуктор.
Елементи гусениць. Інструкція передбачає два види роботів — гусеничний та триколісний. Я робив першого.
Хоча, колісний як на мене був би більш маневрений, особливо на килимі.
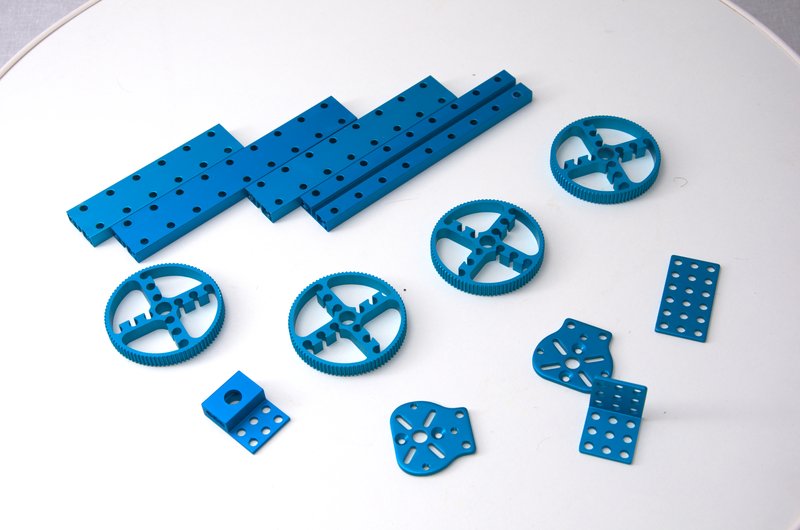
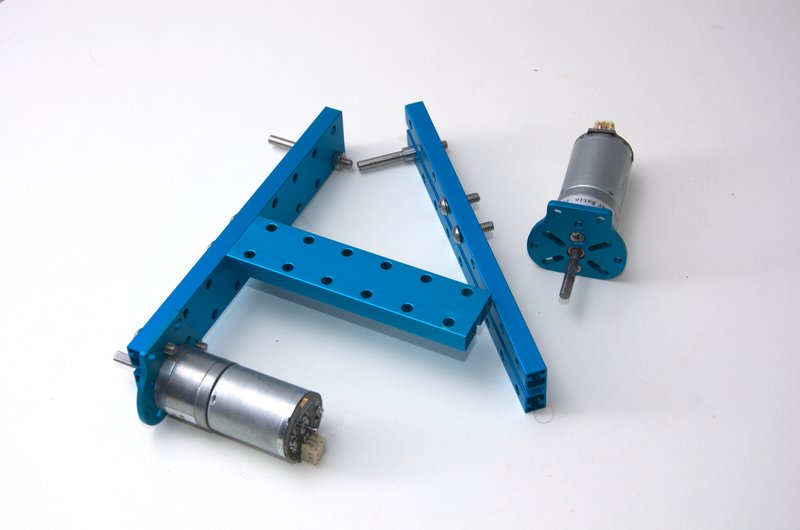
Деталі рами та колеса.
Двигун і перехідник, через який він кріпиться на рамі.
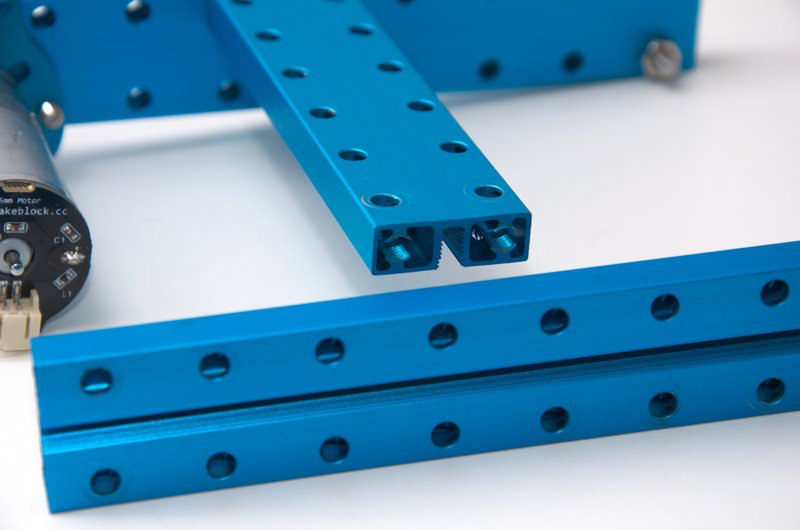
На торцях елементів рами є різьба, куди можна вкручувати гвинтики.
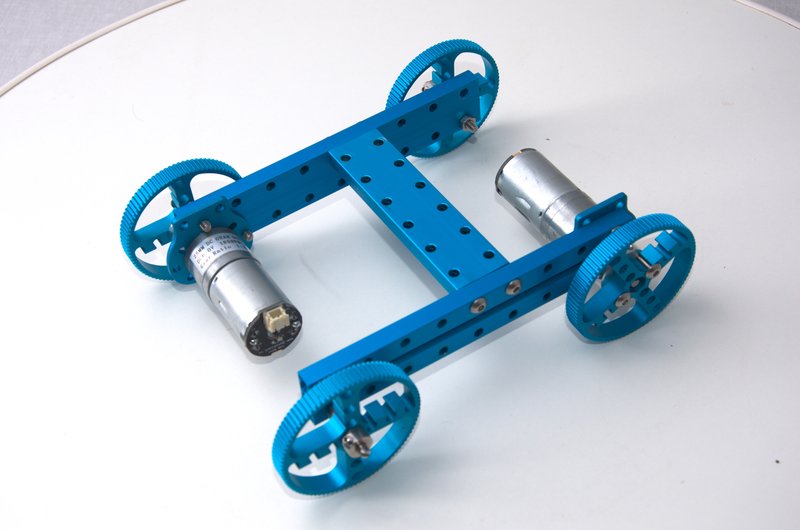
На раму кріпляться два двигуни. Якщо збирати за інструкцією, то рама вузька, один двигун крутить переднє колесо, а другий — протилежне заднє.
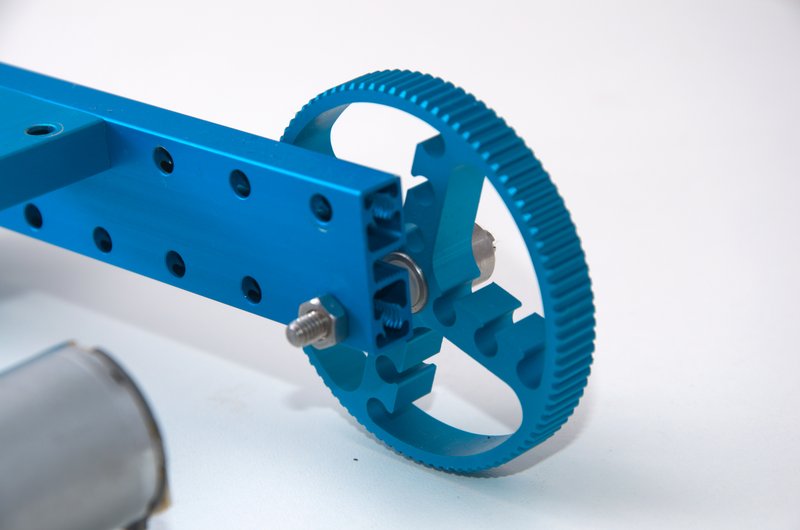
Так кріпиться безмоторне колесо.
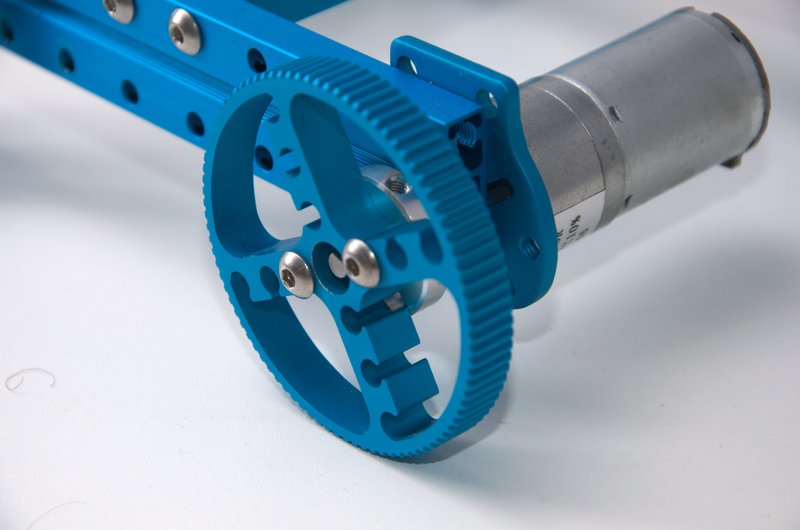
А ось із моторчиком, там теж перехідничок.
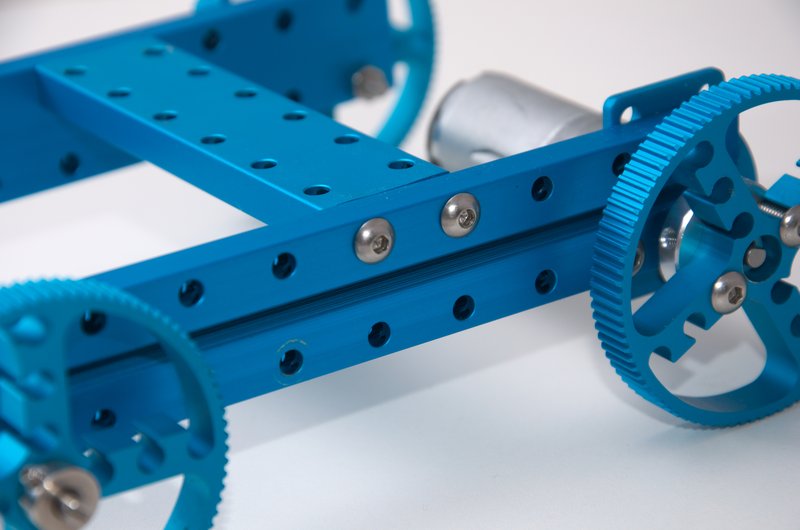
Скручена рама. Положення центральної балки можна міняти, залежно від того, що і як ми будемо чіпляти зверху.
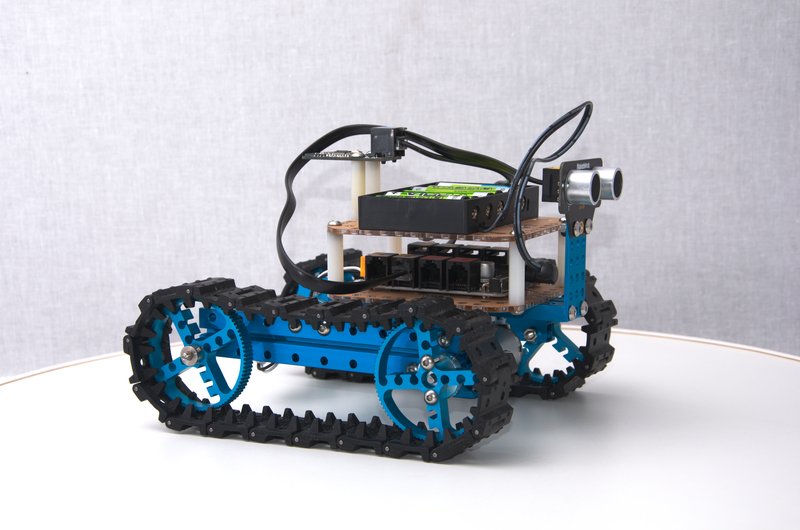
Загальний вигляд рами. Я іще збирав не за інструкцією, тоді на центральну балку взяв довшу деталь і розмістив обидва мотори ззаду.
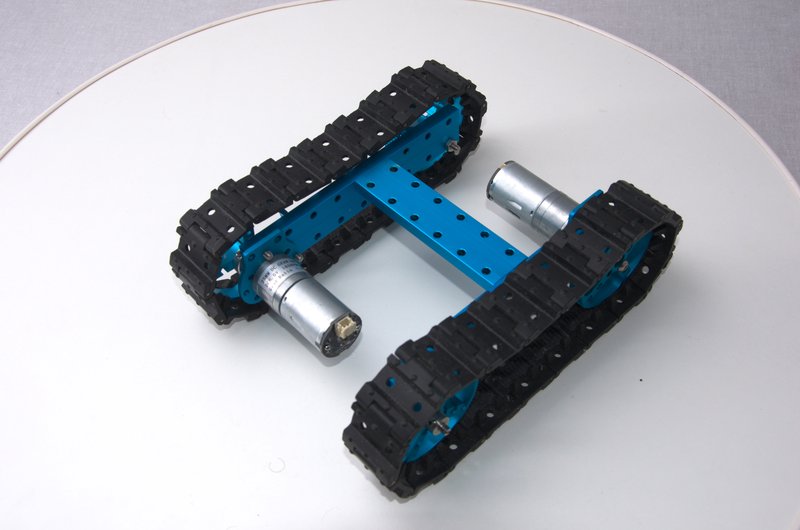
Гусениці теж треба збирати, але вони мені прийшли уже зібрані.
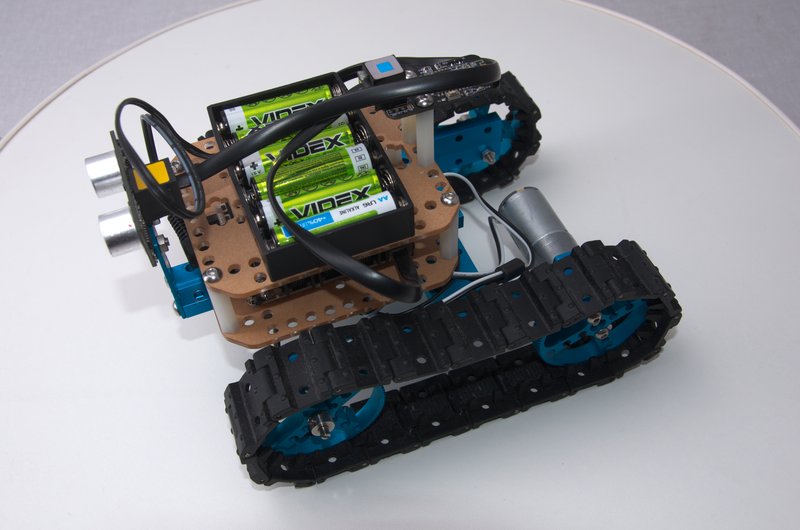
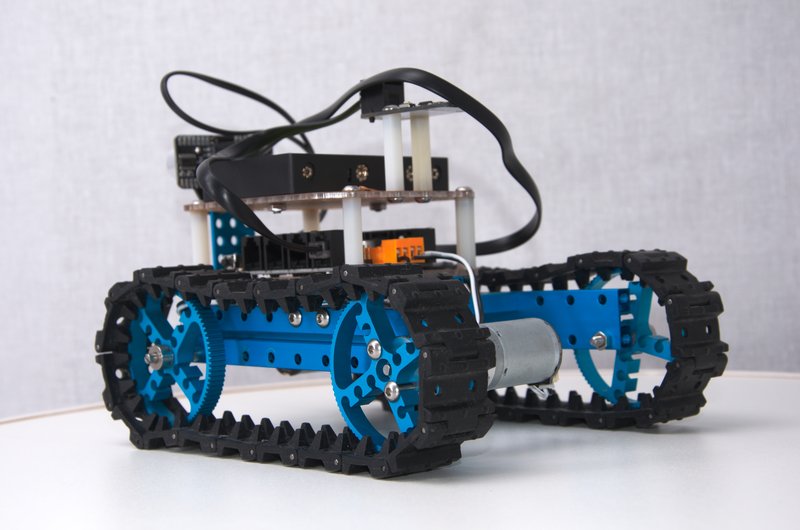
Виходить такий трактор. Символічно, адже власник цього добра нещодавно в біленькій сорочці ... але то вже зовсім інша історія.
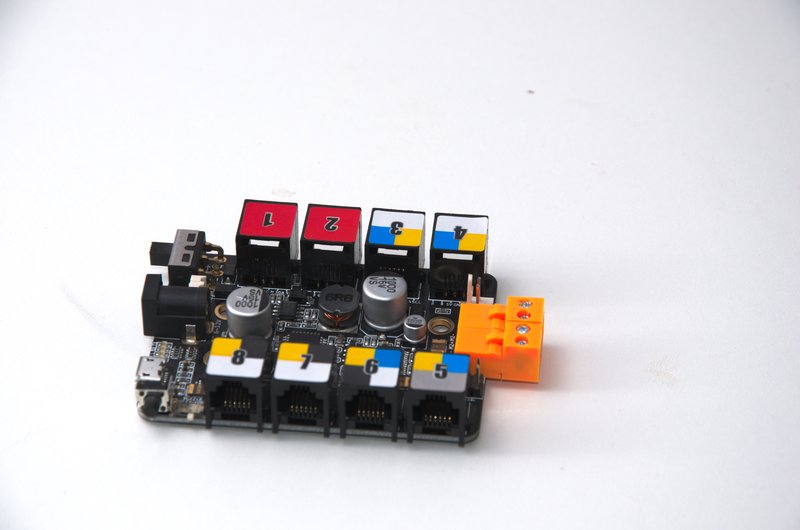
Шасі готове, тепер треба братися за електроніку. Ось плата з Arduino. В ній вмикач, кнопка скидання, вісім виходів на периферійну електроніку та два на ходові мотори (оранжеві). Додаткові сервомотори можна підключати до виходів 1 та 2.
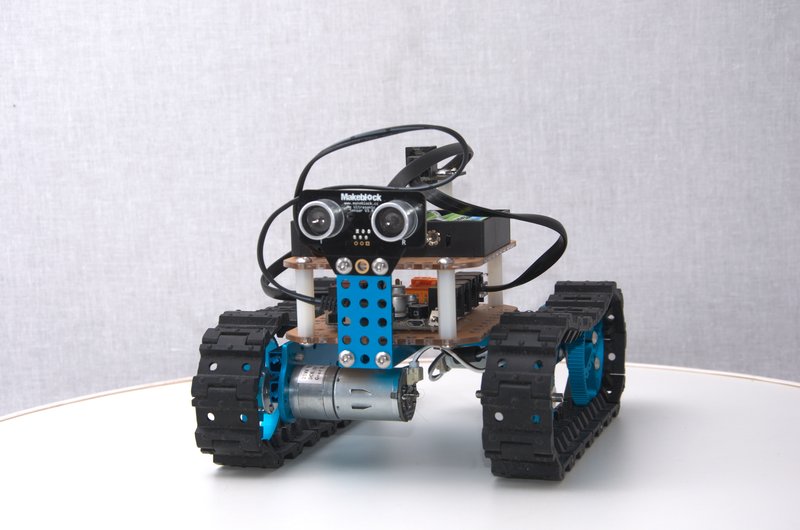
Із периферії до комплекту входять Bluetooth-модуль (є версія з інфрачервоним пультом) та ультразвуковий сонар. Можна докупити багато чого іншого — датчики освітлення, задимлення, газоаналізатори, модуль фотокамери, кінцеві вимикачі, тощо. Сонар має досить вузьку спрямованість, тому робот може впертися гусеницею в перешкоду і не помітити її.
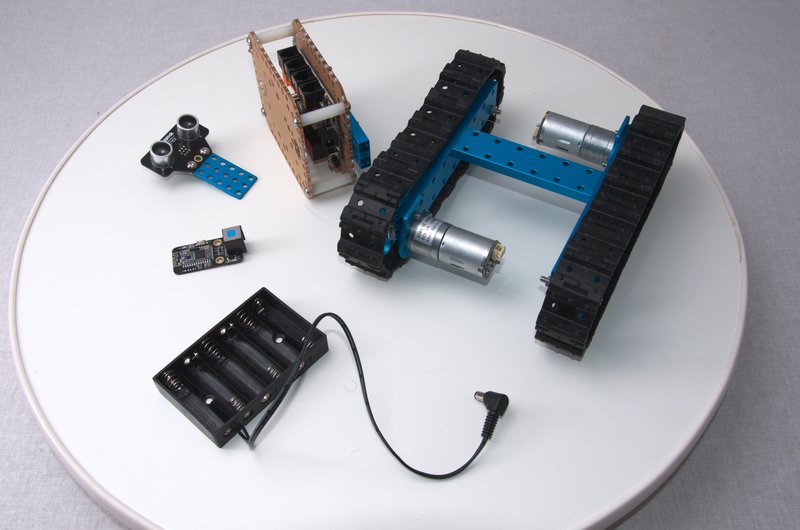
Для електроніки збирається "етажерка", куди також ставиться батарейний блок на 6 АА-батарей. Робот швидко зжере прості батарейки, тому краще ставити ємні акумулятори.
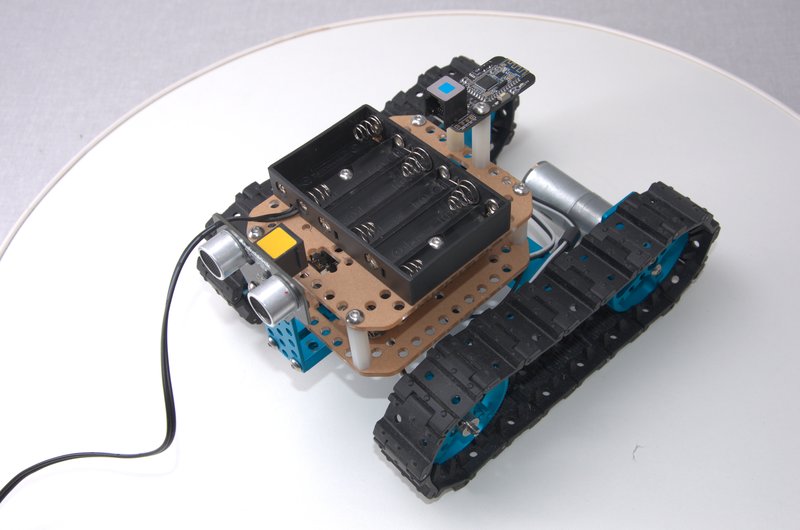
Ось так це виглядає в зібраному стані.
Дроти тут схожі на телефонні. В інструкції детально розписано що куди підключати. Ходові двигуни підключаються звичайними дротами і, можливо, вам треба буде змінити полярність.
Є два шляхи щоб привести робота в рух — пряме керування через Bluetooth, для чого на смартфон слід поставити спеціальний додаток, та рух за написаною вами програмою.
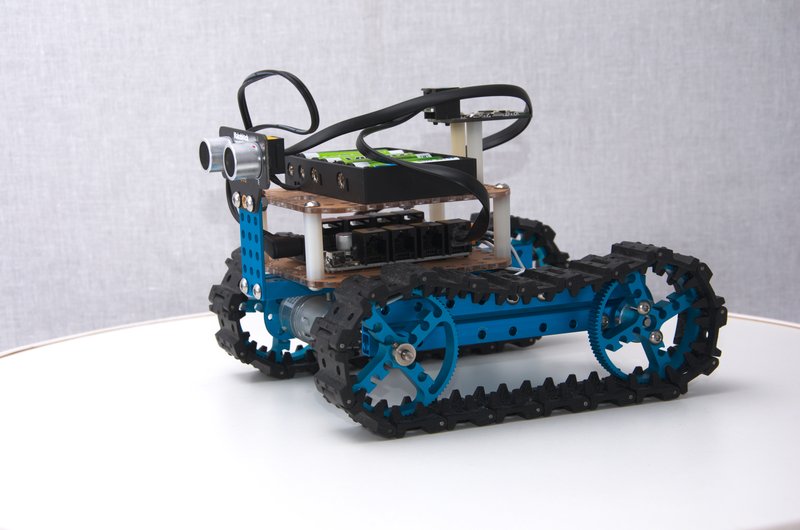
Пряме керування не дуже цікаво — після десяти хвилин їзди по хаті воно набридає. Навіть моєму коту було байдуже, він просто відступався в сторону. Робот бадьоро жужить двигунами та швидко рухається. Великі перешкоди він не долає, є версія Ranger bot, там гусениці з підйомом.
Якщо докупити деталей, то можна приробити маніпулятор та щось ним брати. Або хоча би зробити вантажну платформу та встановити туди дзеркалку — буде рухома платформа для зйомки відео.
При активній їзді, щоправда, є шанс згубити гусениці.
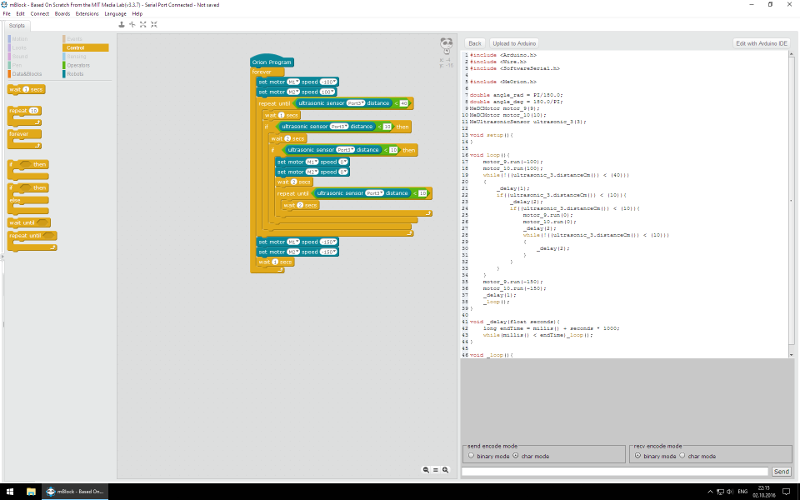
Програмування робота відбувається через USB-кабель за допомогою модифікованої версії Scratch — це для того, щоб ним могли гратися діти молодшого шкільного віку. В програмі можна опитувати датчики та давати команди на мотори, що можуть крутитися із різною швидкістю та в різних напрямках.
Можна запустити Arduino IDE і писати все серйозно, на C++, проте я заради огляду не став курити документацію і зробив усе по простому, мишкою. Після цього однією кнопкою програма заливається на робот і він тут же починає її виконувати — різко рушає з місця і падає зі стола. Добре, що на підлозі лежить м’який килим.
Висновку робити я ніякого не буду, адже це не огляд, просто я поділився враженнями. І на сьогодні в мене все, цікавих вам іграшок, не перемикайтеся.